真实世界中,伴随着光的存在,阴影也会同步出现。因此图形学中,为了让物体看起来更加真实,阴影是不可或缺的。
简介
- 阴影(Shadow),由全影(umbra)和半影(penumbra)组成。
- 全影:拥有完全阴影的区域
- 半影:拥有部分阴影的区域
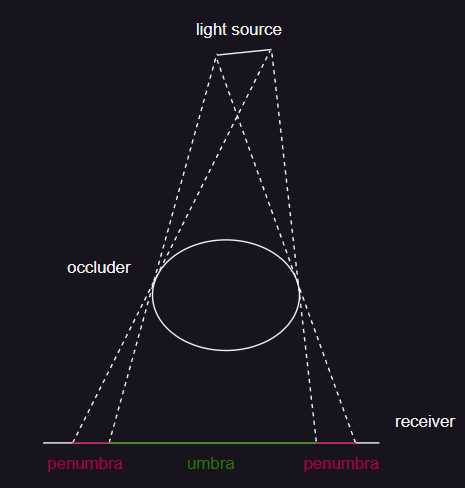
- 硬阴影(Hard Shadow):只有全影区域,边界锐利的阴影。
- 软阴影(Soft Shadow):全影区域和半影区域同时存在的边界柔和阴影,当光源为区域光时产生。
阴影图(Shadow Map)
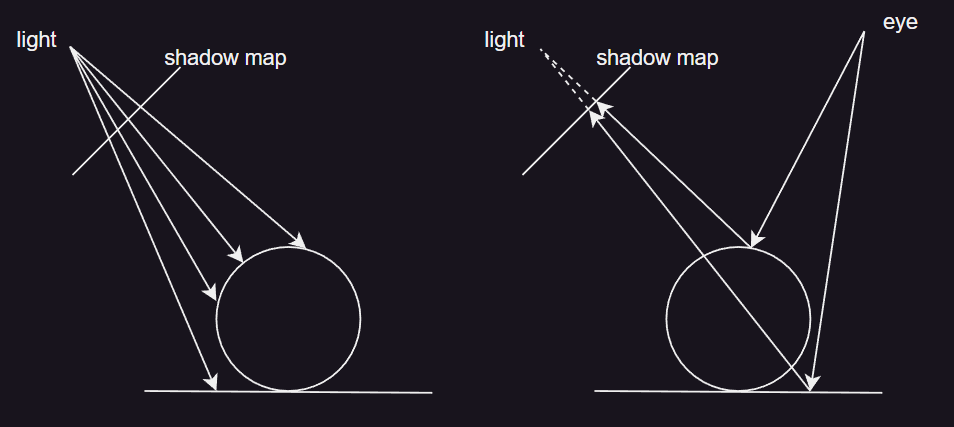
- 1978年,Williams 提出了一种基于 z-buffer 的通用渲染方法,可以用于在任意对象上快速生成阴影。核心思路是:
- 从产生阴影的光源位置出发,渲染整个场景,能被看到的地方则能被照亮,不能被看到的地方即为阴影。生成阴影图的时候,仅需要 z-buffer ,光照、纹理、颜色缓冲写入都可以关闭。此时,z-buffer 中的每个像素记录了光源和最靠近的场景对象的深度值 z。
- 从观察者的角度出发,再次渲染整个场景。每一个对象所在的像素,都要和阴影图比较。如果该像素到光源的距离比阴影图中记录的距离远,则该像素处在阴影中。
- Shadow Map 是非常流行的算法,因为其是相对可预测的。构建阴影图的成本,与渲染图元的数量大致呈线性关系,并且访问时间是恒定的。当场景的光源和物体没有移动时,阴影图可以只生成一次,每一帧都反复使用。
- 而 Shadow Map 的缺点,就是阴影的质量取决于阴影图的分辨率 (以像素为单位) 和 z-buffer 的数值精度。
- 如果想要高精度的阴影,则需要使用较高的分辨率和精度,但相对地就需要占用更大的内存。
- 如果要限制内存占用,则需要牺牲阴影的精度,即可能出现混叠等问题。
阴影粉刺(Shadow Acne)
- 由于阴影图是在深度比较期间采样的,因此该算法容易出现混叠问题,尤其是靠近对象之间的接触点。一个常见的问题是自阴影混叠,通常叫 surface acne 或 shadow acne,即三角面被错误认为是阴影。产生此问题的原因有两个:
- 处理器精度的数值极限问题。
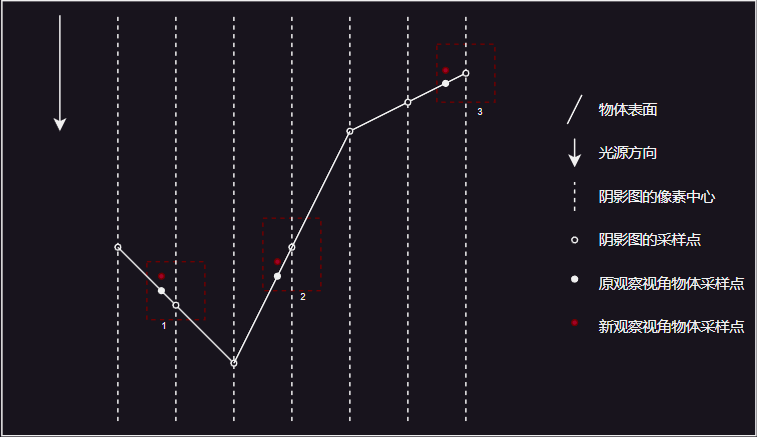
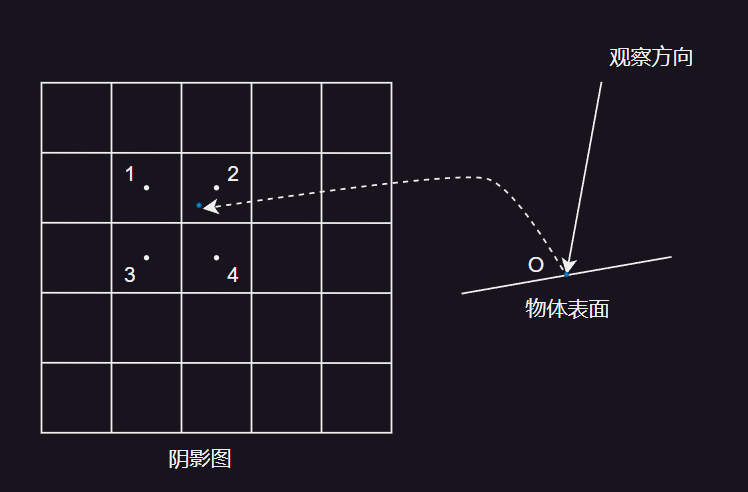
- 采样点的值代表的是一个区域的深度值,从光源出发的采样点,几乎不会和从观察方向出发的采样点相同。
斜率比例偏差(Slope Scale Bias)
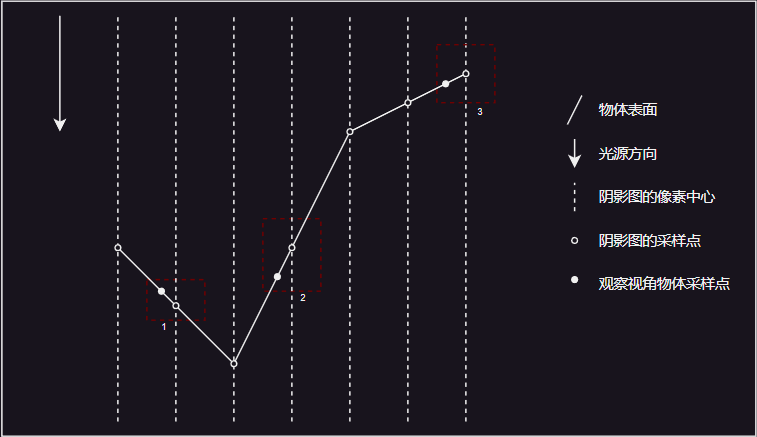
- 可以看到,区域1中物体表面的点的深度比阴影图的采样点深度小(距离光源更近),因此能被正常照亮,而区域2、3中点的深度,则比阴影图的采样点深度大,因此被错误地认为是在阴影中,因为比较时取了阴影图另一个点的深度来比较。
- 为了避免出现 shadow acne 问题,一个常用的方法是引入偏差因子,即当物体的深度与阴影图进行比较前,先对物体深度减去一个小的偏移量后,再进行比较。
- 然而,如果接收阴影的物体表面和光源越趋于平行时,使用常量的偏移量则容易出现错误。如上图中使用了常量的偏移量,区域1、3能正常被照亮,但区域2仍然会处于阴影中。
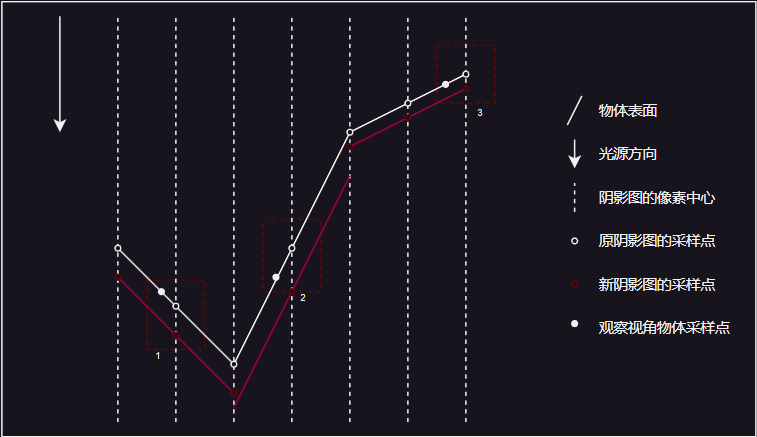
- 另一种更有效的方法是,通过物体表面和光源的角度来设置阴影图的偏移量,阴影图的深度会加上这个偏移量后再进行比较。表面与光源越接近平行,偏移量就越大,从而避免问题。这种类型的偏差即为斜率比例偏差。
- 当物体表面和光源接近垂直时,斜率比例偏差几乎为 0,因此一般需要将常量偏差和斜率比例偏差一起使用,来避免出现混叠问题。
法线偏移偏差(Normal Offset Bias)
- 法线偏移偏差,是通过将采样点沿着物体表面法线方向偏移,偏移量与法线和光源之间的角度的正弦成正比。对于中心样本,这可以被认为是移动到原始表面上方的假想表面。这种偏差不仅会影响深度,还会更改用于阴影图测试的纹理坐标。
Peter 平移(Peter Panning)
- 当偏移量太大时,会导致一个称为 light leaks 或 Peter Panning 的问题,即物体看起来会稍微高于下表面。因为物体接触点下方的区域被推得太远,导致比较深度后不能接收到阴影。
- 因此,偏移量的选择需要根据实际情况进行调整。
PCF(Percentage-Closer Filtering)
- PCF 是 Shadow Map 的一个扩展,可以用于产生伪软阴影,也可以用于改善由于分辨率不足引起的块状阴影问题。
- 如图所示,PCF 的流程为
- 对于物体表面的点,找到到阴影图中的对应点。
- 对阴影图中的点,找到相邻的四个像素点,对阴影图进行采样。
- 对每个采样得到的深度结果,和物体表面的深度进行比较,用 0 表示阴影,1 表示光照。
- 将所有比较结果进行双线性插值,得到光源最终在物体表面的作用量。
- 采样、修改附近的阴影图位置,有很多不同的选择,包括采样的面积有多宽,要使用多少样本,采样模式以及如何对结果进行加权等。
- PCF 是非物理的处理方式。因为在真实物理世界中,软阴影的大小会受遮挡物体和接收物体的距离影响,而 PCF 只会从着色点映射到阴影图进行采样,与遮挡物体的距离并不会影响的阴影大小,因此最终会得到几乎相同的软阴影区域。
- 然而,自阴影问题,以及前面提到的 Shadow Acne 和 Peter Panning 问题,在 PCF 下会表现得更加糟糕。例如,原本使用 Slope Scale Bias 的时候,阴影图会根据物体表面斜率将表面往远离光源的方向偏移,从而采样点能正常照亮。而当 PCF 在阴影图较大范围采样时,得到的结果可能由非阴影变成阴影,即出现自阴影问题。
- 为了解决自阴影问题,需要通过使用常数偏移、斜率比例偏差、接收平面、视图偏差、法线偏差的组合,但仍然需要对根据不同的环境进行手动调整。
PCSS(Percentage-Closer Soft Shadows)
- 尽管 PCF 能产生软阴影,但是遮挡物体的和光源的距离并不会影响的阴影大小,因此软阴影的大小基本是相同的。在此基础上,Fernando 提出了 Percentage-Closer Soft Shadow(PCSS)方法,主要包括三个步骤:
- 遮挡物查找。
- 半影尺寸估算。
- 可变的 PCF 处理。
遮挡物查找
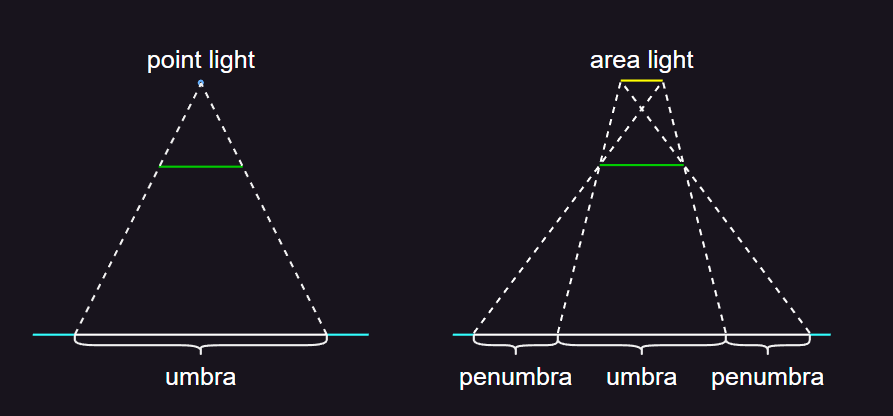
- 从图中可以发现,点光源只能产生全影区域,而半影区域需要区域光产生。
- 当光源为点光源时,每一个着色点,只有一个点光源对其产生作用,映射到阴影图上的一个点,比较深度后确定是否处在阴影中,通过 PCF 方法,来生成软阴影。
- 而当光源为区域光时,从光源中心出发产生阴影图,每一个着色点,有一片区域光对其产生作用,映射到阴影图上。阴影图上的采样区域大小,受光源大小、接收物体和光源的距离影响。
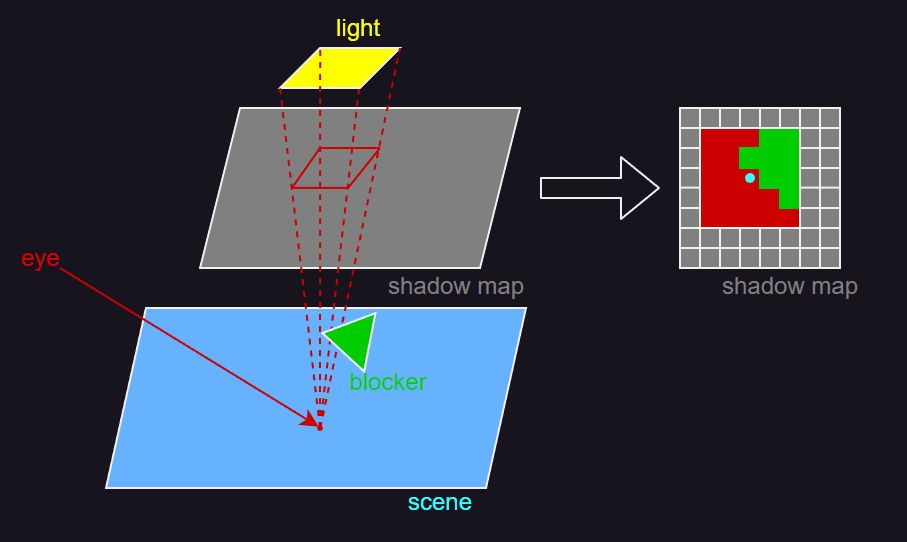
- 可以看到,从光源出发,到场景点的所有遮挡物区域,即阴影图这个区域中深度比着色点的深度小的像素点,即右侧阴影图的绿色点。
半影尺寸估算
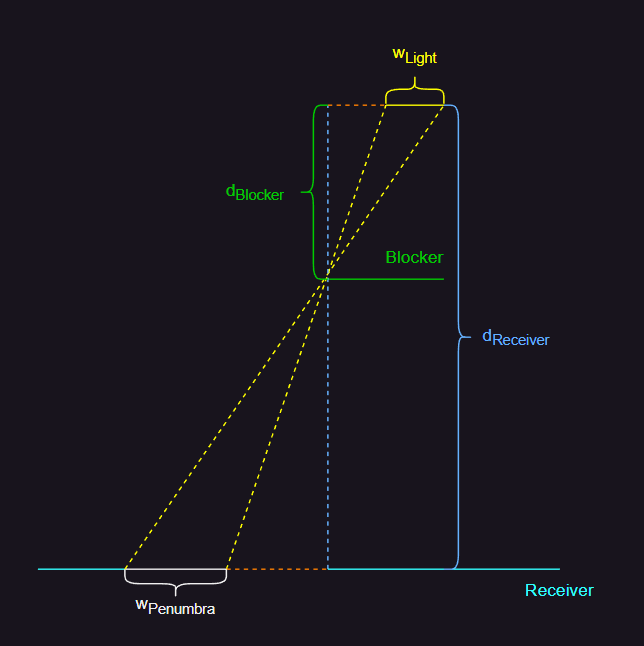
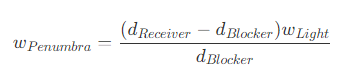
- 从上图可以得到,半影的大小和光源大小、光源到接收面的距离、光源到阻挡物的距离有关,可以表示为
- 为了得到半影的尺寸,需要的参数有
- 接收物到光源的距离。
- 遮挡物到光源的距离。
- 光源大小。
- 其中,光源大小一般是已知的,可以通过 shader 统一的输入获得。而接收物到光源的距离,也就是该点在光源下的深度,也可以直接计算得到。而遮挡物到光源的距离,不能直接得到。
- 遮挡物在阴影图上为一个区域,如果直接取其中的最小值,则会受最小值的所在位置影响,导致可能出现伪阴影。通常需要对阴影图上所有遮挡物的深度求平均值,来作为遮挡物到光源的距离。
- 至此,所有需要的参数都已经得到,则半影的尺寸可以估算出来。
可变的 PCF 处理
- 常规的 PCF ,对各个点都采用相同的内核进行滤波。而可变的 PCF 内核则可以使用变化的滤波范围,以及不同数量的采样点。通过上一个步骤,可以估算出来每个点对应的半影尺寸,因此会基于每个结果来确定每个点执行 PCF 使用的内核参数。
- 通过估算得到半影大小后,为了优化性能,可以选择只有存在半影时,才进行 PCF 处理,则省去了全影和完全光照区域的多余计算过程。
VSM(Variance Shadow Mapping)
- PCF 中,计算着色点的阴影时,需要对阴影图的多个样本点进行采样,来得到着色点的光照量,即非阴影的占比。然而,当使用较大范围的采样区域和较多的样本点,对一个着色点进行处理时,会有较大的性能压力。
切比雪夫不等式
- 切比雪夫不等式指出,对于随机变量 X ,其有限期望为 E(X) = μ ,有限方差 D(X) = σ^2 ,则对任意 a > 0,变量 X 在 [-∞, -μ - a] 和 [μ + a, +∞] 范围的概率 P 满足
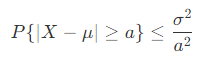
- 也就是说,对一批离散数据,在某个范围内的样本数量占比,可以通过该不等式直接估算出来。
单边的切比雪夫不等式
- 单边切比雪夫不等式,可以由马尔科夫不等式推导得到。单边的切比雪夫不等式指出,对于随机变量 X' = X - μ ,期望为 E(X') = E(X - μ) = 0 ,有限方差 D(X') = D(X - μ) = σ^2 ,则对任意 a' > 0 ,变量 X' 在 [a', +∞] 范围的概率 P 满足
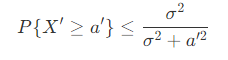
- 可以看出,单边不等式是对将原数据减去期望值后得到的关系,即求 X' ≥ a' 范围的概率,就是求 X ≥ a' + μ 范围的概率。因此求 X ≥ a 的范围,即 a = a' + μ ,则不等式可以表示为
阴影应用
- 对应到 PCF 中,X 即为阴影图上滤波区域的深度值,a 即为着色点在光源下的深度值,P 即为未被遮挡(a ≤ X)的占比,也就是 PCF 计算需要的结果。
- 然而,P 是一个上界,而 PCF 需要得到一个具体值,当满足某些条件时,可以取最大值为最终结果。
- 当光源通过一个深度为 d1 的平面遮挡物,在深度为 d2 的平面接收物上产生阴影,设 p 为未被遮挡的概率,由于遮挡物只有一个,且为平面,因此在小范围内,遮挡的区域深度都为 d1 ,未被遮挡的区域都为 d2 ,则期望 μ 为
 方差 σ^2 为
方差 σ^2 为
 此时未被遮挡的范围,即 X ≥ d2 ,则 P 的上限值为
此时未被遮挡的范围,即 X ≥ d2 ,则 P 的上限值为

- 此时上限值即为未被遮挡的概率,即可以直接用上限值来估算。
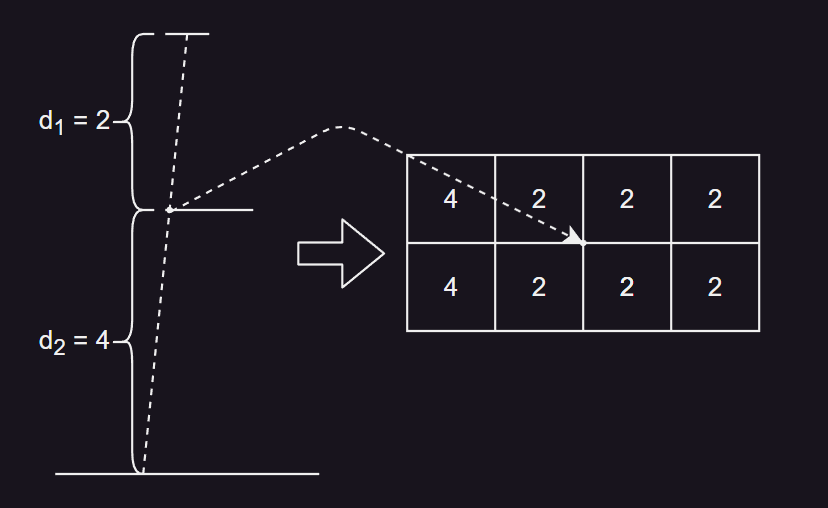
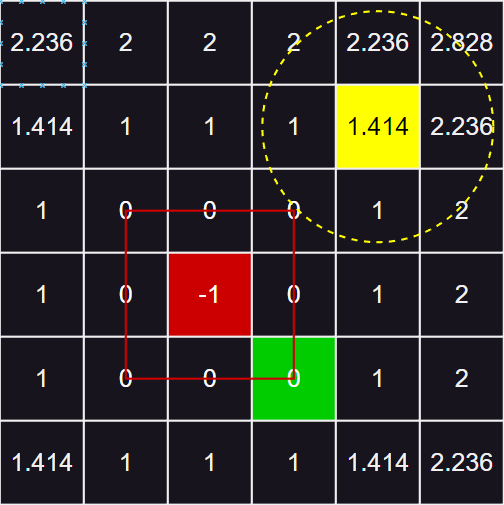
- 如上图示例,未被遮挡的点,即为阴影图采样区域中,深度不小于 4 的值,则 PCF 计算占比为 2/8 = 0.25 。采样区域期望为 2.5 ,方差为 0.75 ,则根据单边切比雪夫不等式估算的上限值为 0.75/(0.75 + (4 - 2.5)^2 = 0.25 ,和 PCF 估算值一致。
- 尽管有一定的使用条件,但通常都会使用上限值来作为 PCF 的简化计算,一般都能得到较好的表现结果。
SAT(Summed-Area Table)
- 使用单边的切比雪夫不等式估算时,都需要获得每个点在阴影图上某个范围内的期望和方差值,而期望和方差可以通过 Mipmap 或 SAT 方式来快速获得。
- 对阴影图构建对应的 Mipmap 纹理后,当查找某个点的期望时,能够直接从图上采样得到,速度很快,然而也有一定的不足:
- 需要正方形区域。
- 只能生成多级纹理,如果在两级之间的,即便使用三线性插值来获取,也只能获得近似值。
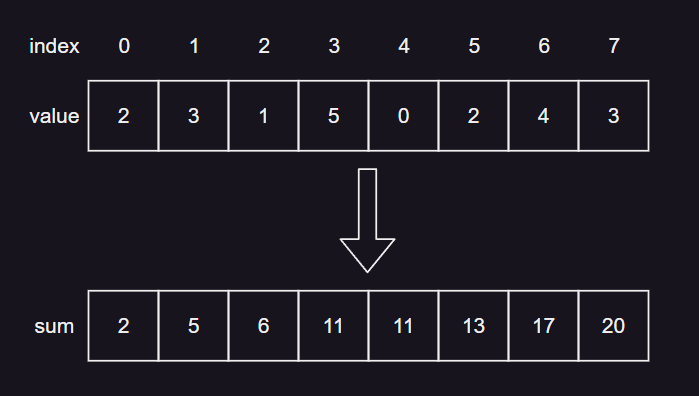
- 如图所示,value[index] 为原始数据,sum[index] 为 value[0] ~ value[index] 的和。当需要求 value[i] ~ value[j] 的平均值时,则
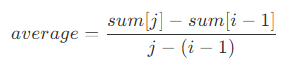 即原本算法需要 O(n) ,使用 SAT 后只需要 O(1) 即可得到。
即原本算法需要 O(n) ,使用 SAT 后只需要 O(1) 即可得到。
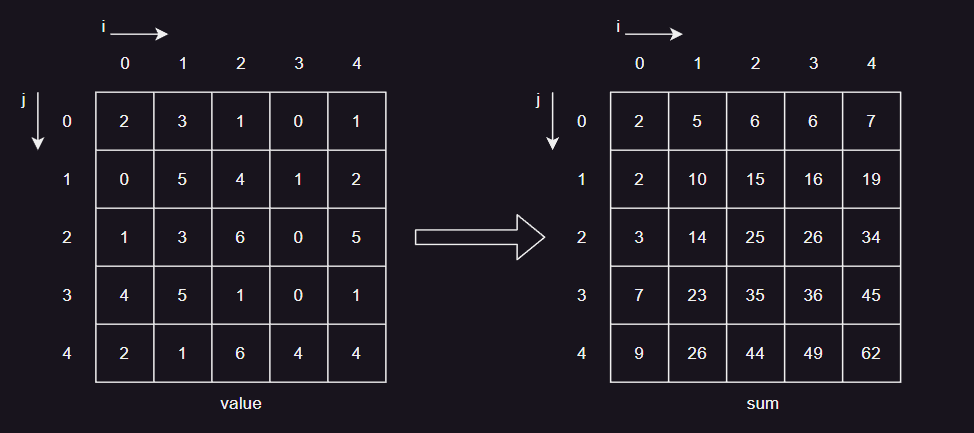
- 对于二维数据,当需要求 value[left, right] ~ value[top, bottom] 的平均值时,则
 即只需要知道左上、左下、右上、右下的值,就可以在 O(1) 内得到平均值。
即只需要知道左上、左下、右上、右下的值,就可以在 O(1) 内得到平均值。 - 阴影图记录了光源下每个像素的深度值,需要增加一张图记录每个像素的深度平方值,通过分别构建 SAT 数据,即能在 O(1) 时间内得到 PCF 的结果。
- 对于 SAT 数据的构建,通常需要一次遍历,即时间复杂度为 O(n) 。在 GPU 生成时,由于需要依赖前一个数据,因此需要 n 个 pass 。
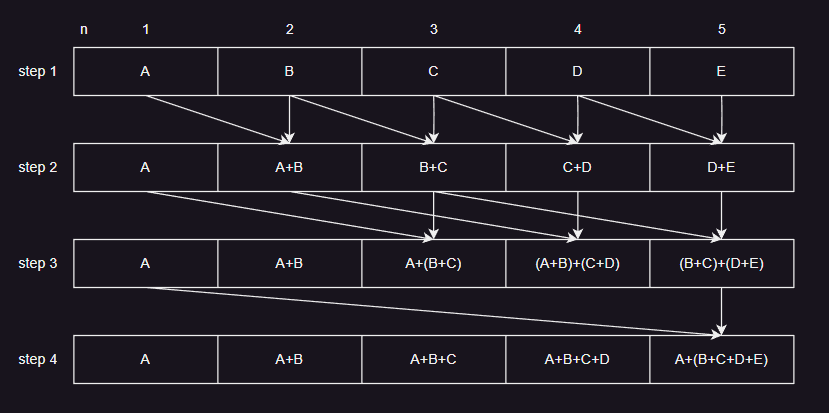
- Justin Hensley 提出了加速算法,如上图所示,主要步骤为:
- 第 1 步,将每个像素的值,加上左边第 1 个像素的值,此时每个像素为 2 个数据的和。
- 第 2 步,将每个像素的值,加上左边第 2 个像素的值,此时每个像素为 4 个数据的和。
- 第 3 步,将每个像素的值,加上左边第 4 个像素的值,此时每个像素为 8 个数据的和。
- 第 k 步,对每个像素的值,加上左边第 2^(k - 1) 个像素的值,此时每个像素为 2^k 个数据的和。
- 重复以上步骤,直到每个像素为 n 个数据的和。
- 此加速算法充分利用了 GPU 并行计算的优势,对于一维的 n 个数据,只需要 O(log n) 时间即可完成 SAT 数据的构建。对于二维数据,只需要先进行一次横向处理,再进行一次竖向处理,即可得到 SAT 数据。
VSSM(Variance Soft Shadow Mapping)
算法介绍
- 在 PCSS 中,第三步使用 PCF 计算,可以使用 VSM 来优化计算,然而第一步查找遮挡物,同样需要采样阴影图中的一个区域,来找到被遮挡部分的平均深度。定义
- X :阴影图上滤波区域的深度值。
- a :着色点在光源下的深度值。
- z_unocc :滤波区域中 X ≥ a 的所有样本点的平均深度。
- z_occ :滤波区域中 X < a 的所有样本点的平均深度。
- z_avg :滤波区域所有样本点的平均深度。
- N :滤波区域的样本点数量。
- N_unocc :滤波区域中 X ≥ a 的样本点数量。
- N_occ :滤波区域中 X < a 的样本点数量。
- P :滤波区域中 X ≥ a 的比例。
- 则有以下关系
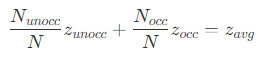
- 可以得到 z_occ 的表示
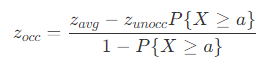
- 同样假设遮挡物和接收物都为平面,则未被遮挡的平均深度 z_unocc 即为着色点深度 a ,通过 VSM 可以得到阴影图的平均深度 z_avg ,以及未被遮挡的区域占比 P ,因此平均深度同样可以在 O(1) 时间内得到,从而计算效率得到较大的提升。
非平面性问题
- 单边切比雪夫不等式中要求,a' = a - μ > 0 ,即 a > z_avg ,不等式才能成立。当遮挡物和接收物都为一个平面时,能满足这个关系。然而当出现非平面性的问题,即有多个遮挡物、多个接收物等情况,出现 a ≤ z_avg 时,会出现漏光的问题,即在本应该无光照的区域出现了光照效果。尽管通过在更小范围内使用更多采样点,能解决这个问题,但就会回到 PCF 计算带来的性能问题。因此,需要引入滤波器内核细分方案来处理非平面性问题。
- 当 a ≤ z_avg 时,表示着色点没有被遮挡,即光照计算结果为 1 。当滤波内核 w 较小时,即滤波区域较小时,阴影图区域内的绝大部分像素深度值都比着色点深度大,因此能认为都没有被遮挡。随着内核 w 逐渐增大,平均深度的误差会越来越大,因此会出现错误的结果。因此需要使用较小的滤波内核,即解决步骤为:
- 将滤波内核划分成更小的子内核 w'。
- 子区域中,如果 a > z'_avg ,则可以使用单边切比雪夫不等式计算。
- 子区域中,如果 a ≤ z'_avg ,则有两种处理方式:
- 认为子区域中所有像素都未被遮挡。
- 使用常规 PCF 采样,进行阴影测试。
- 由于内核足够小,因此对于 a ≤ z'_avg 的第一种处理方式能够成立,这种处理方式也符合 VSM 的思路。同样,在小内核下,第二种方式能以很低的性能消耗进行 PCF 2x2 采样来得到非常准确的结果。因此第二种方式也经常被使用。
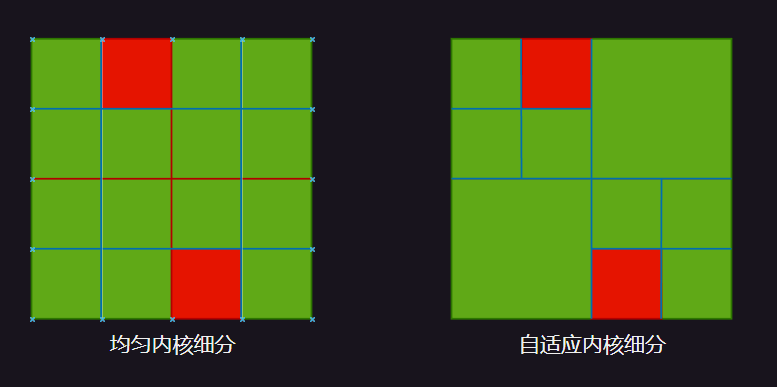
- 对于内核的细分,有均匀细分和自适应细分方案。
- 均匀细分:将区域切分成均等大小的子区域,子区域分为常规组和非平面组。计算平均遮挡深度时采用 m x m 的内核,计算软阴影时采用 n x n 的内核。当 m 为 5 时能得到较好的表现,而 n 通常要比 m 大。
- 自适应细分:通过构建四叉树,将区域进行划分,如果子区域 a > z'_avg ,则不需要再划分。如果 a ≤ z'_avg ,则此子区域需要继续划分,直到子区域的方差小于阈值,经过测试,阈值一般定位 0.0001r,其中 r 为输入场景球形包围盒的半径。
局限性
- 当数据出现多个峰值时,用正态分布来描述数据会不准确,此时使用 VSM 或 VSSM 进行阴影估计时,得到的结果则不准确。可以使用 MSM(Moment Shadow Mapping)来改善,即使用更高阶的矩(moment)。VSM 和 VSSM 使用二阶矩(方差)来描述数据的分布情况,对正态分布的数据则能得到较好的结果。对于其他数据情况,使用越高的矩则越能准确描述出数据的分布情况。通常情况下,使用四阶矩就足够近似得到数据分布情况。
DFSS(Distance Field Soft Shadow)
- DFSS 不是基于 Shadow Mapping 的方法,而是在着色点和光源的连线上,通过 SDF 查找每个点与遮挡物的最小距离,得到安全角度,从而计算出着色点的光照量。
SDF
- SDF(Signed Distance Filed),有向距离场,即场景中所有点都有一个距离值,表示到最近的物体表面的距离。其中,物体表面外的点为正数,物体内部的点为负数,物体表面上的点则为 0 。
- 如上图所示,在 2D 平面上,边长为 1 红色正方形边框为场景物体,红色格子为物体内部,则到表面的最小距离为 -1 ,绿色格子在物体表面,则距离为 0 ,黄色格子在物体外面,则距离为正。3D 场景类似。
- 关于如何构建 SDF ,可以参考 算法篇 — EDT 欧式距离变换 。
- 场景中的单个物体同样可以用 SDF 来表示,如圆心为 O 、半径为 r 的圆距离函数可以表示为:

- 其中,P 为任意一点,则距离为 P 到 O 的距离与半径的差值(圆内为负数,圆上为 0 ,圆外为正数)。
- 每个物体(刚体)都可以具有各自的 SDF 距离函数,因此如果要知道场景中某个点距离最近的物体,只需要以该点查找所有物体的 SDF 函数,其中距离最小对应的物体即为目标物体。
Ray marching(Sphere tracing)
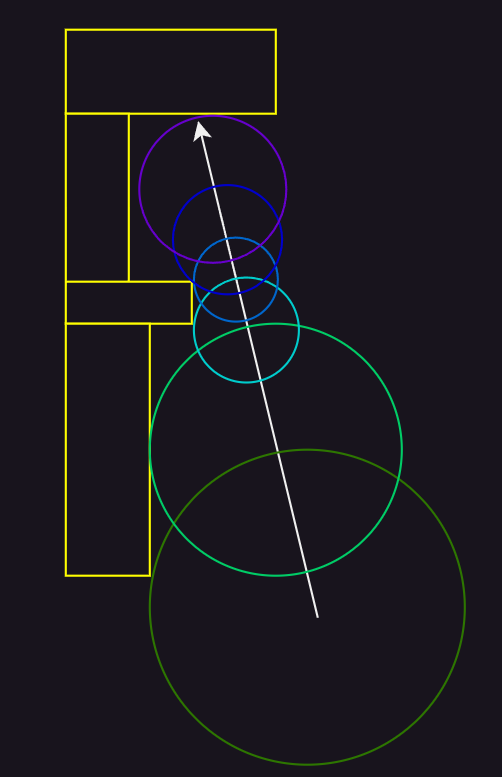
- 步进式光线追踪,即从某个点出发,通过查找 SDF 得到该点离物体的最小距离,以该点为圆心可以构建出一个圆,这个圆代表安全范围,即圆内不会有其他物体。沿着光源的方向,与圆有一个交点,将交点作为新的起点,重复前面的步骤,直到抵达物体表面。
应用
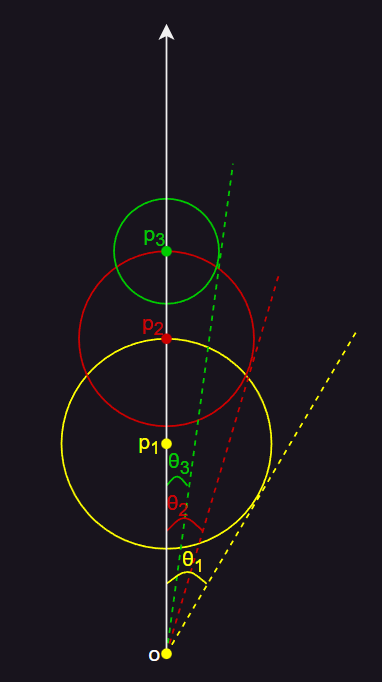
- 在 Ray marching 过程中,每一步都会产生一个安全范围圆,从着色点 o 出发,找到与圆的切线,得到一个安全角度 θ ,即光源面到着色点不被遮挡的角度。如果最后不能达到光源,则说明被遮挡了。如果到达光源了,则所有安全角度中,最小的角度即为着色点对光源最终的安全角度,即在这个角度内的所有光照都不会被遮挡,如果超过这个角度,则会有部分光照被遮挡。安全角度可以表示为
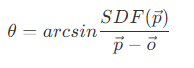
- 在 shader 中反三角函数的计算比较复杂,Inigo Quilez 指出,从着色点朝光源发出的阴影射线与遮挡物的最近交点,如果越靠近阴影射线,或者越靠近着色点,则着色点的阴影越深,因此提出了着色点的光照计算公式:
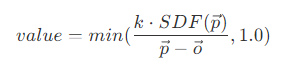
- 其中,k 用于控制半影区域的大小,当 k 越大时,则被完全照亮的区域越大,即半影区域越小。其他参数都可以在 Ray marching 过程中得到,因此通过此方法计算阴影可以有非常高的效率。

引自 https://iquilezles.org/articles/rmshadows/
改进方案
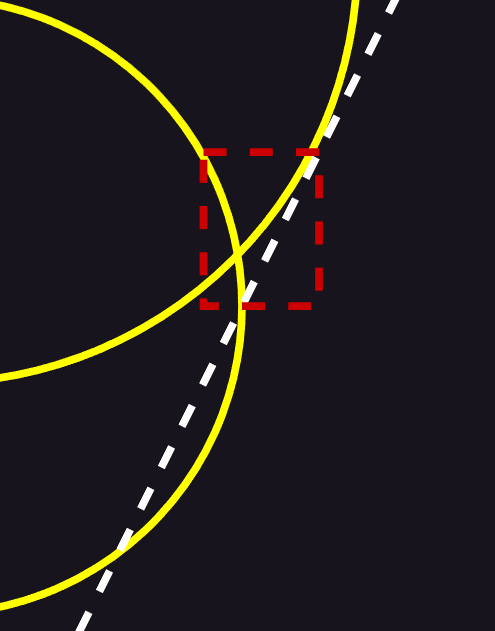
- 在步进的过程中,安全角度通过圆的切线可以得到,如上图白色虚线所示,代表在白色虚线以内的范围内光不会被遮挡。
- 事实上,步进过程只能保证圆内没有任何阻挡,从上图红色框中可以看到,白色虚线以内有一小部分区域并不在圆内,假设图中绿色点处有遮挡物,则在原来的算法上,这个遮挡物也会被正常照亮,从而出现错误表现。也就是说,最小安全角度不再是白色虚线的角度,应该为绿色虚线的角度。
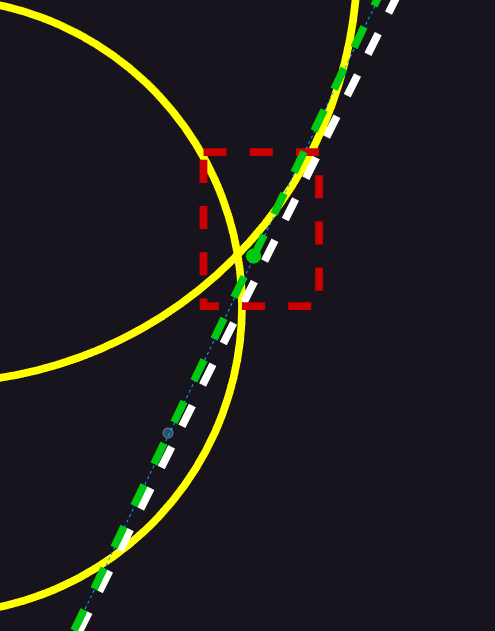
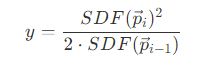
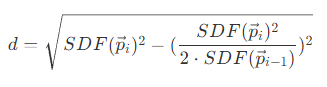
- 在 DFSS 方案提出的七年后,Sebastian Aaltonen 提出了一个改进方案,即在步进的过程中,可以估算最近的遮挡点在两个圆的交点附近。其中,d 为两个圆交点连线距离的一半,y 为当前圆心到两圆交点连线的距离。
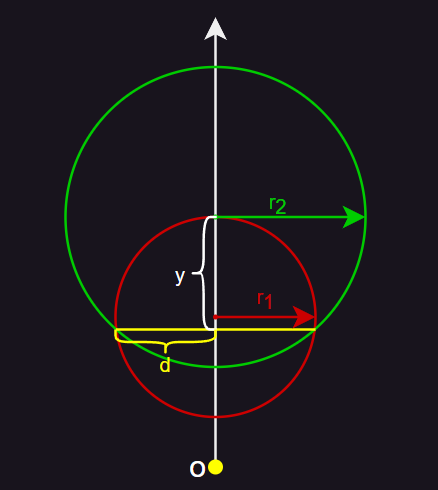
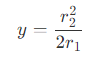
- 由图中可以得到关系
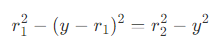 则可以得到
则可以得到
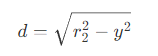
- 而改进后的算法则为

 其中,w 表示光源大小(立体角)。
其中,w 表示光源大小(立体角)。 - 改善后的效果如下
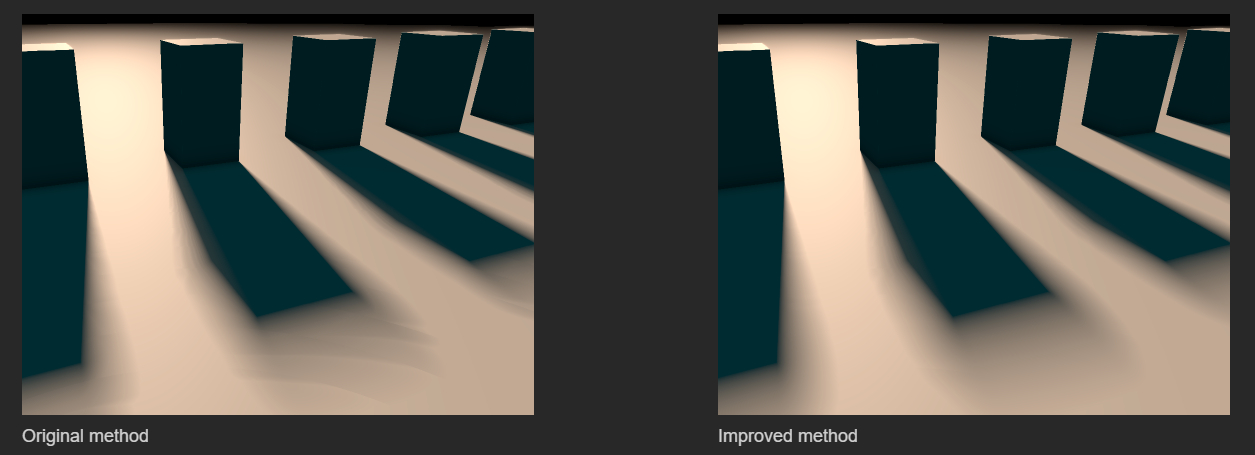
引自 https://iquilezles.org/articles/rmshadows/ - Inigo Quilez 还提出了另外的优化方案,即步进过程,当到达物体表面时,会继续往前延伸,直到阴影真正变暗(即光照结果为 -1),通过这种调整,最终的 SDF 阴影看起来非常接近物理上正确的效果,如图所示
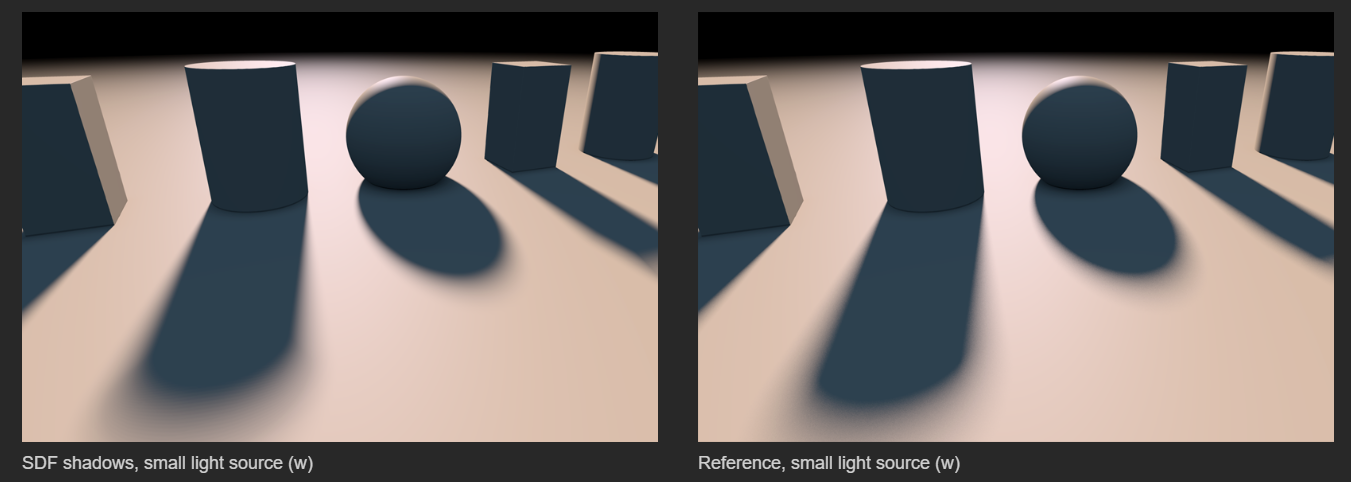
引自 https://iquilezles.org/articles/rmshadows/ 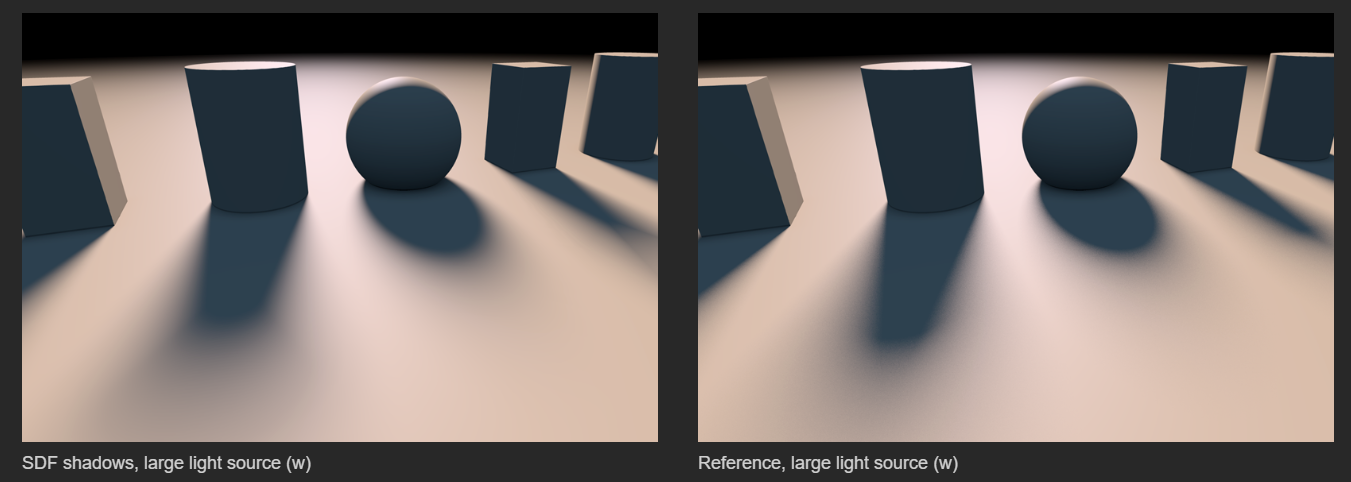
引自 https://iquilezles.org/articles/rmshadows/
总结
- 阴影是渲染中非常重要的一个技术,对于呈现更加真实的画面来说至关重要。Shadow Mapping 技术,基于其概念简单以及实现方便,目前仍然是使用相对普遍的技术。而 SDF 类的技术,在某些情况下也有优于 Shadow Mapping 的表现和性能。阴影的实现方式有很多,简单的可以是统一的圆底,复杂的可以是实时阴影,需要根据不同的项目需求,来选择适合的实现方式。
参考文献
- Percentage Closer Soft Shadows
- Variance Shadow Maps
- Variance Soft Shadow Mapping
- Fast Summed-Area Table Generation and its Applications
- Soft Shadows in RayMarched SDFs-2010