环境光遮蔽(AO)技术,用于模拟场景中的光照,使场景中的物体看起来更加真实。
简介
- 随着设备的更新换代,现代游戏玩家对画面质量的要求越来越高,全局光照成为提升游戏视觉效果的关键技术。全局光照技术基于物理光学原理,通过计算光线在场景中的反射、折射和散射等过程,模拟真实世界的光照效果,使得游戏场景看起来更加逼真。然而,这种真实带来的代价就是计算成本过高,离线生成一个静态场景的效果可能需要花上几个小时,并不适用于实时渲染。因此,需要通过简单但在视觉上仍然令人信服的解决方案的进行替代,一种基本的全局照明效果是环境光遮蔽(Ambient Occlusion)。
基础概念
立体角(Solid Angle)
- 平面角定义为角所对的弧长
s与半径r的比值,用ω表示。
- 立体角(Solid Angle)则是在三维空间下的角度,其所对的面积
A与半径r的平方的比值,用Ω表示。
- 立体角通过
θ和φ两个角度来表示,其中θ是与z轴的夹角,φ是与x轴或y轴的夹角。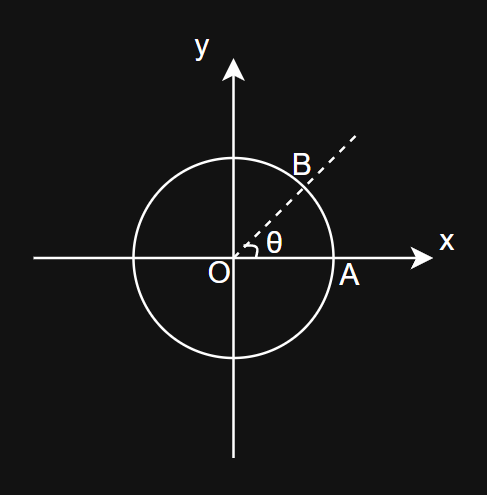
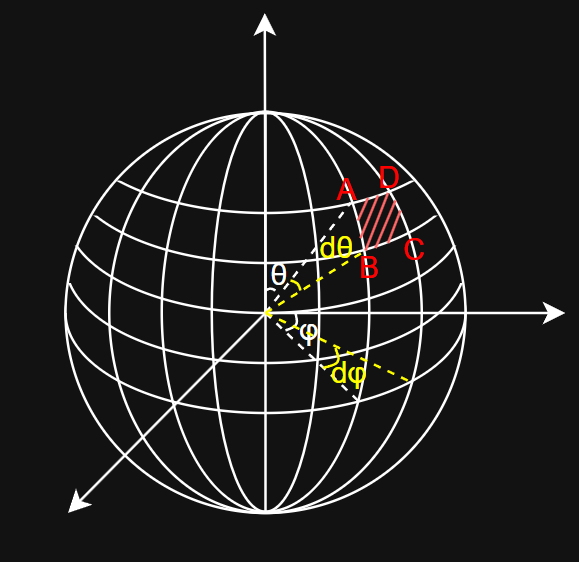
- 如图所示,对于单位立体角
dΩ(即dθ和dφ),其所对的面积A即为矩形 ABCD(近似)的面积,即 其中,AB 为
其中,AB 为 dθ对应的弧长,CD 为dφ对应的弧长,则有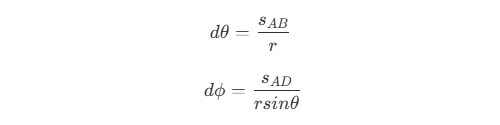 因此
因此

辐射能量(Radiant Energy)
- 辐射能量(Radiant Energy)是指电磁辐射的能量,用
Q表示。
辐射通量(Radiant Flux)
- 辐射通量(Radiant Flux)是指单位时间内的辐射能量,用
Φ表示。 其中,
其中,Q是辐射能量,t是时间。
辐射强度(Radiant Intensity)
- 辐射强度(Intensity)是指单位立体角内的辐射通量(所有面积光总和),用
I表示。 其中,
其中,Φ是总辐射通量,Ω是立体角。
辐照度(Irradiance)
- 辐照度(Irradiance)是指单位面积上接收到的辐射通量(所有立体角方向总和),用
E表示。 其中,
其中,Φ是总辐射通量,A是接收面积。
辐射率(Radiance)
- 辐射率(Radiance)是指单位立体角,在单位面积上辐射通量,用
L表示。 其中,
其中,Φ是总辐射通量,Ω是立体角,A是接收或光源面积,对应入射或出射辐射率。基于理想漫反射表面(Lambert 表面),只有垂直于光的投影面积,才是真正的辐射面积,所以辐射率最终需要对面积进行修正,即A cosθ。 - 由于总辐射通量是所有面积所有方向的辐射通量总和,所以需要对立体角和面积进行二次微分。
渲染方程(Rendering Equation)
- 渲染方程(Rendering Equation)是全局光照模型中的基本方程,用于描述光在场景中的传播和反射。渲染方程的基本形式为:
 其中,
其中,p为观察的物体表面位置,v为观察方向,l为光的入射方向,n为物体表面法线,n · l表示入射光被物体表面接收(和投影面垂直)的比例,f为物体表面反射率(接收到的光反射到观察方向的比例)。
环境光遮蔽(Ambient Occlusion)
- 为了实现全局光照模型效果,则需要求解渲染方程,常用的方法有两种,即有限元方法和蒙特卡洛方法。其中,光能传递是基于有限元方法的算法,各种形式的光线追踪则是使用蒙特卡洛方法。然而,这些方法虽然可以产生较好的效果,但生成一帧图像可能需要花费数个小时,并不适用与动态场景。
- 为了将全局光照效果应用到计算生成的场景中,需要使用一些简化的模型方法,一种基本的方法是环境光遮蔽(Ambient Occlusion,AO)。为了简化,假设两个条件:
- 物体表面为 Lambert 表面。
- 入射辐射率在各个方向上都为相同的常量
L'。
- 根据前面的辐射率公式,可以得到辐照度
E为
- 然而,当前辐照度并未考虑可见性,即某些方向的光可能被场景中其他物体或自身某些部分阻挡,则这些方向的入射辐射度不为
L'。假设来自被遮挡方向的入射辐射度为 0 ,未被遮挡方向的入射辐射度为 1,则 其中,
其中,v为可见性函数,L'后的积分部分为环境光遮蔽因子,用k表示,即
- 当所有方向都没有遮挡时,
v为 1 ,此时k有最大值。当所有方向都被遮挡时,v为 0 ,此时k有最小值。
- 因此,归一化的环境光遮蔽因子
k'为 辐照度
辐照度 E为
- 通过环境光遮蔽方法计算全局光照效果,最终会转换为通过计算环境遮挡因子实现。计算环境遮挡因子可能很耗时,通常需要执行在渲染之前离线进行。预先计算任何与光照相关的过程,包括环境遮挡在内的信息,通常被称为烘焙。预计算环境光遮挡最常见的方法是通过蒙特卡洛方法,即在法线周围的半球面上,均匀地随机取 N 个方向,并沿着这些方向追踪光线,检查这些方向最终是否可见,对结果求平均值,即为
k'的估算值,则能计算出对应的辐照度。
屏幕空间环境光遮蔽(Screen Space Ambient Occlusion)
- 计算环境遮挡因子的离线方法,能得到较好的表现效果,但需要进行光线追踪计算,计算成本较高,且仅适用于静态场景。对于实时动态场景,需要使用更加简化的模型,避免大部分此类计算。对于动态场景,可以通过将物体进行分组后,再用简化模型替代每一组,之后计算每一个简化模型的 SDF 信息,就能通过锥体追踪得到光线的遮挡信息。
- 然而,在物体空间下进行计算的方法,随着场景复杂度的提升,计算量会越来越大,造成新的性能压力。事实上,关于遮挡的一些信息可以完全从屏幕空间数据中推断出来,如:深度、法线,这些数据在渲染过程中已经生成。屏幕空间下计算的方法,不受场景复杂度的影响,而是仅和渲染过程使用的分辨率相关,因此具有恒定的计算成本。
- 屏幕空间下的环境光遮蔽(Screen Space Ambient Occlusion,SSAO),通过使用 z-buffer 深度缓冲区作为唯一输入,来估算每个像素的环境遮挡因子。在以像素位置为圆心的球面上,随机取一组采样点,进行深度测试,最终通过深度测试的样本数量占比即为环境遮挡因子。
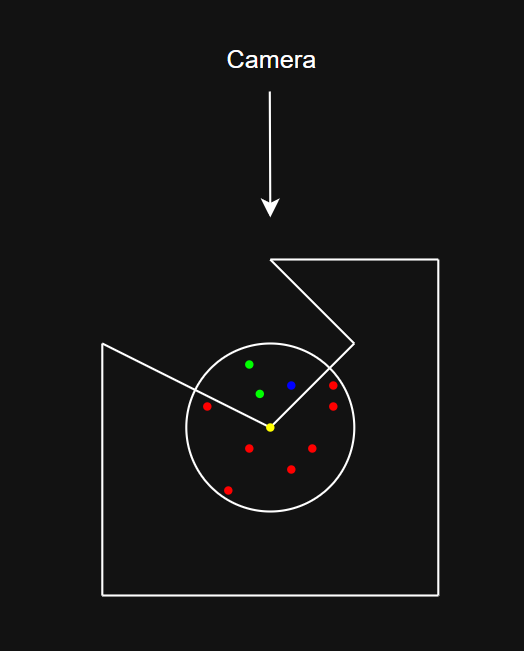
- 如图所示,相机在正上方,黄色点为当前计算的像素位置点,其余点为采样点,分布在以黄色点为圆心的球面上。其中,红色点在物体内部,即未通过深度测试,而蓝色点虽然在物体外部,但在相机方向上被遮挡,即同样未通过深度测试,仅绿色点能通过深度测试,因此环境遮挡因子
k'为 0.2 。 - 其中,样本的选取,不是只考虑位于表面上方半球内的位置,而是包括了物体内部的位置。在这种采样方式下,会出现一个平坦的表面会变暗,且边缘比周围更亮的情况。尽管如此,这种表现结果通常在视觉上依然能令人满意。
Unity 中的 SSAO 实现
- URP(14.0.12)中的
SSAO实现在ScreenSpaceAmbientOcclusion.cs中,主要代码如下:
// ./Runtime/RenderFeatures/ScreenSpaceAmbientOcclusion.cs
...
public override void Execute(ScriptableRenderContext context, ref RenderingData renderingData)
{
if (m_Material == null)
{
Debug.LogErrorFormat("{0}.Execute(): Missing material. ScreenSpaceAmbientOcclusion pass will not execute. Check for missing reference in the renderer resources.", GetType().Name);
return;
}
var cmd = renderingData.commandBuffer;
using (new ProfilingScope(cmd, m_ProfilingSampler))
{
...
GetPassOrder(m_BlurType, m_CurrentSettings.AfterOpaque, out int[] textureIndices, out ShaderPasses[] shaderPasses);
// Execute the SSAO
RTHandle cameraDepthTargetHandle = m_Renderer.cameraDepthTargetHandle;
RenderAndSetBaseMap(ref cmd, ref renderingData, ref m_Renderer, ref m_Material, ref cameraDepthTargetHandle, ref m_SSAOTextures[0], ShaderPasses.AmbientOcclusion);
// Execute the Blur Passes
for (int i = 0; i < shaderPasses.Length; i++)
{
int baseMapIndex = textureIndices[i];
int targetIndex = textureIndices[i + 1];
RenderAndSetBaseMap(ref cmd, ref renderingData, ref m_Renderer, ref m_Material, ref m_SSAOTextures[baseMapIndex], ref m_SSAOTextures[targetIndex], shaderPasses[i]);
}
// Set the global SSAO Params
cmd.SetGlobalVector(s_AmbientOcclusionParamID, new Vector4(1f, 0f, 0f, m_CurrentSettings.DirectLightingStrength));
}
}
...
SSAO执行过程主要包括几个步骤:- 通过
GetPassOrder方法,获得当前模糊类型对应需要执行的Pass组。 - 通过
RenderAndSetBaseMap方法,传入深度图,执行ScreenSpaceAmbientOcclusion.shader的Pass 0(ShaderPasses.AmbientOcclusion),输出到m_SSAOTextures[0]上。 - 遍历
Pass组,通过RenderAndSetBaseMap方法,将上一次的输出结果作为输入,执行每一个Pass输出。 - 设置
s_AmbientOcclusionParamID。
- 通过
SSAO Pass
ShaderPasses.AmbientOcclusion对应的Pass的像素着色器为SSAO,其实现如下:
// ./ShaderLibrary/SSAO.hlsl
...
half4 SSAO(Varyings input) : SV_Target
{
UNITY_SETUP_STEREO_EYE_INDEX_POST_VERTEX(input);
float2 uv = input.texcoord;
// Early Out for Sky...
float rawDepth_o = SampleDepth(uv);
// 1. 过滤深度范围,去除过小(天空盒距离)/过大(用户设置距离)
if (rawDepth_o < SKY_DEPTH_VALUE)
return PackAONormal(HALF_ZERO, HALF_ZERO);
// Early Out for Falloff
float linearDepth_o = GetLinearEyeDepth(rawDepth_o);
half halfLinearDepth_o = half(linearDepth_o);
if (halfLinearDepth_o > FALLOFF)
return PackAONormal(HALF_ZERO, HALF_ZERO);
float2 pixelDensity;
#if defined(SUPPORTS_FOVEATED_RENDERING_NON_UNIFORM_RASTER)
UNITY_BRANCH if (_FOVEATED_RENDERING_NON_UNIFORM_RASTER)
{
pixelDensity = RemapFoveatedRenderingDensity(RemapFoveatedRenderingNonUniformToLinear(uv));
}
else
#endif
{
pixelDensity = float2(1.0f, 1.0f);
}
// 2. 计算当前像素的法线、世界坐标(以相机为原点)
// Normal for this fragment
half3 normal_o = SampleNormal(uv, linearDepth_o, pixelDensity);
// View position for this fragment
float3 vpos_o = ReconstructViewPos(uv, linearDepth_o);
// Parameters used in coordinate conversion
// 传入的 VP 矩阵在 ScreenSpaceAbmibentOcclusion.OnCameraSetup 中特殊处理了,移除了相机的位移变换,即假设相机为世界坐标原点
half3 camTransform000102 = half3(_CameraViewProjections[unity_eyeIndex]._m00, _CameraViewProjections[unity_eyeIndex]._m01, _CameraViewProjections[unity_eyeIndex]._m02);
half3 camTransform101112 = half3(_CameraViewProjections[unity_eyeIndex]._m10, _CameraViewProjections[unity_eyeIndex]._m11, _CameraViewProjections[unity_eyeIndex]._m12);
const half rcpSampleCount = half(rcp(SAMPLE_COUNT));
half ao = HALF_ZERO;
half sHalf = HALF_MINUS_ONE;
UNITY_UNROLL
// 3. 采样多个点,计算 ao 值
for (int s = 0; s < SAMPLE_COUNT; s++)
{
sHalf += HALF_ONE;
// 3.1 取采样点,计算其世界坐标(以相机为原点)和屏幕坐标
// Sample point
half3 v_s1 = PickSamplePoint(uv, s, sHalf, rcpSampleCount, normal_o, pixelDensity);
half3 vpos_s1 = half3(vpos_o + v_s1);
half2 spos_s1 = half2(
camTransform000102.x * vpos_s1.x + camTransform000102.y * vpos_s1.y + camTransform000102.z * vpos_s1.z,
camTransform101112.x * vpos_s1.x + camTransform101112.y * vpos_s1.y + camTransform101112.z * vpos_s1.z
);
// 3.2 计算采样点深度值和uv
half zDist = HALF_ZERO;
#if defined(_ORTHOGRAPHIC)
zDist = halfLinearDepth_o;
half2 uv_s1_01 = saturate((spos_s1 + HALF_ONE) * HALF_HALF);
#else
// 从世界空间变换到观察空间,并取反,得到深度值
zDist = half(-dot(UNITY_MATRIX_V[2].xyz, vpos_s1));
half2 uv_s1_01 = saturate(half2(spos_s1 * rcp(zDist) + HALF_ONE) * HALF_HALF);
#endif
#if defined(SUPPORTS_FOVEATED_RENDERING_NON_UNIFORM_RASTER)
UNITY_BRANCH if (_FOVEATED_RENDERING_NON_UNIFORM_RASTER)
{
uv_s1_01 = RemapFoveatedRenderingLinearToNonUniform(uv_s1_01);
}
#endif
// 3.3 计算采样点对应的uv,在深度图中的深度值,并检查采样点深度是否该深度的半径范围内
// Relative depth of the sample point
float rawDepth_s = SampleDepth(uv_s1_01);
float linearDepth_s = GetLinearEyeDepth(rawDepth_s);
// We need to make sure we not use the AO value if the sample point it's outside the radius or if it's the sky...
half halfLinearDepth_s = half(linearDepth_s);
half isInsideRadius = abs(zDist - halfLinearDepth_s) < RADIUS ? 1.0 : 0.0;
isInsideRadius *= rawDepth_s > SKY_DEPTH_VALUE ? 1.0 : 0.0;
// 3.4 计算深度图该深度值对应的点和当前像素点的相对坐标
// Relative postition of the sample point
half3 v_s2 = half3(ReconstructViewPos(uv_s1_01, linearDepth_s) - vpos_o);
// 3.5 计算每个采样点的 ao 影响
// Estimate the obscurance value
// kBeta 为防止自遮蔽的偏置量
half dotVal = dot(v_s2, normal_o) - kBeta * halfLinearDepth_o;
// 采样点的向量在法线上的投影,正半球会产生遮蔽
half a1 = max(dotVal, HALF_ZERO);
// 距离越近,遮蔽贡献更大,kEpsilon 防止出现分母为 0
half a2 = dot(v_s2, v_s2) + kEpsilon;
ao += a1 * rcp(a2) * isInsideRadius;
}
// 4. 计算最终的 ao 值
// Intensity normalization
// a1 为 O(RADIUS) ,a2 为 O(RADIUS^2),ao = a1 / a2 导致 ao 受 RADIUS 影响,乘上 RADIUS 抵消该影响。
ao *= RADIUS;
// Calculate falloff...
half falloff = HALF_ONE - halfLinearDepth_o * half(rcp(FALLOFF));
falloff = falloff*falloff;
// Apply contrast + intensity + falloff^2
ao = PositivePow(saturate(ao * INTENSITY * falloff * rcpSampleCount), kContrast);
// 5. 将 ao 和法线打包返回,a 为 ao,gba 为法线
// Return the packed ao + normals
return PackAONormal(ao, normal_o);
}
...
SSAO Pass主要通过取多个采样点,计算深度符合要求的且在当前点正半球上的点的ao值,累加后求平均值,得到所有采样点在当前点上产生的最终ao值。
Blur Pass
SSAO Pass计算完成后,还需要根据不同的设置进行双边滤波,主要如下:
| 模糊类型 | 渲染顺序 | Pass组 |
|---|---|---|
Bilateral |
不透明渲染前 | BilateralBlurHorizontal(1)BilateralBlurVertical(2) BilateralBlurFinal(3) |
Bilateral |
不透明渲染后 | BilateralBlurHorizontal(1)BilateralBlurVertical(2) BilateralAfterOpaque(3) |
Gaussian |
不透明渲染前 | GaussianBlurHorizontal(5)GaussianBlurVertical(6) |
Gaussian |
不透明渲染后 | GaussianBlurHorizontal(5)GaussianAfterOpaque(7) |
Kawase |
不透明渲染前 | KawaseBlur(8) |
Kawase |
不透明渲染后 | KawaseAfterOpaque(9) |
- 模糊的核心方法为
Blur和BlurSmall,其中Blur取水平或竖直的点进行模糊计算,而BlurSmall取对角线进行计算。Blur的实现如下:
// ./ShaderLibrary/SSAO.hlsl
...
half4 Blur(const float2 uv, const float2 delta) : SV_Target
{
half4 p0 = SAMPLE_BASEMAP(uv );
half4 p1a = SAMPLE_BASEMAP(uv - delta * 1.3846153846);
half4 p1b = SAMPLE_BASEMAP(uv + delta * 1.3846153846);
half4 p2a = SAMPLE_BASEMAP(uv - delta * 3.2307692308);
half4 p2b = SAMPLE_BASEMAP(uv + delta * 3.2307692308);
half3 n0 = GetPackedNormal(p0);
half w0 = half(0.2270270270);
// CompareNormal 用于过滤掉和当前点法线偏差过大的采样点
half w1a = CompareNormal(n0, GetPackedNormal(p1a)) * half(0.3162162162);
half w1b = CompareNormal(n0, GetPackedNormal(p1b)) * half(0.3162162162);
half w2a = CompareNormal(n0, GetPackedNormal(p2a)) * half(0.0702702703);
half w2b = CompareNormal(n0, GetPackedNormal(p2b)) * half(0.0702702703);
half s = half(0.0);
s += GetPackedAO(p0) * w0;
s += GetPackedAO(p1a) * w1a;
s += GetPackedAO(p1b) * w1b;
s += GetPackedAO(p2a) * w2a;
s += GetPackedAO(p2b) * w2b;
s *= rcp(w0 + w1a + w1b + w2a + w2b);
return PackAONormal(s, n0);
}
...
- 最后一步的模糊处理和前面的稍有不同,以
Bilateral为例,最后一个模糊处理的像素着色器FinalBlur的实现如下:
// ./ShaderLibrary/SSAO.hlsl
...
half4 FinalBlur(Varyings input) : SV_Target
{
UNITY_SETUP_STEREO_EYE_INDEX_POST_VERTEX(input);
const float2 uv = input.texcoord;
const float2 delta = _SourceSize.zw * rcp(DOWNSAMPLE);
return HALF_ONE - BlurSmall(uv, delta );
}
...
- 在最后一个模糊处理完成前,
ao值代表遮蔽量,而最后一个模糊处理完成后的值,会设置到directAmbientOcclusion和indirectAmbientOcclusion上,在计算光照的时候进行相乘,所以需要的是光照可达性,即1 - ao。 - 而对于在不透明渲染完成后的
ao计算,则还需要进行其他处理,同样以Bilateral为例,最后一个模糊处理的Pass的实现如下:
// ./Shader/Utils/ScreenSpaceAmbientOcclusion.shader
...
Pass
{
Name "SSAO_Bilateral_FinalBlur_AfterOpaque"
ZTest NotEqual
ZWrite Off
Cull Off
Blend One SrcAlpha, Zero One
BlendOp Add, Add
HLSLPROGRAM
#pragma vertex Vert
#pragma fragment FragBilateralAfterOpaque
#include_with_pragmas "Packages/com.unity.render-pipelines.core/ShaderLibrary/FoveatedRenderingKeywords.hlsl"
#include "Packages/com.unity.render-pipelines.universal/ShaderLibrary/SSAO.hlsl"
half4 FragBilateralAfterOpaque(Varyings input) : SV_Target
{
half ao = FinalBlur(input).r;
return half4(0.0, 0.0, 0.0, ao);
}
ENDHLSL
}
...
- 在不透明渲染后的最后模糊处理,直接将
1 - ao作为a通道输出。可以看到,此Pass采用了Blend One SrcAlpha, Zero One,即
| 通道 | Src因子 | Dst因子 | 公式 | 输出结果 (像素着色器的返回是 (0, 0, 0, ao)) |
|---|---|---|---|---|
RGB |
One |
SrcAlpha |
SrcColor * One + DstColor * SrcAlpha |
缓冲区颜色 * ao |
A |
Zero |
One |
SrcAlpha * Zero + DstAlpha * One |
缓冲区透明度 |
- 不透明渲染后的
SSAO,最终利用ao值直接和缓冲区的结果进行混合,不需要额外写一个读取场景颜色再乘回去的全屏Pass,也不需要进行现有Shader的改造,就能获得AO效果,实现简单。但在物理上是错误的,因为AO同时遮蔽了直射光和高光,画面会比正常更暗。 - 尽管如此,此方案也因为其兼容性和便利性,而被一些项目采用,甚至在观感上认为此表现的对比度更强,更符合美术期望。
总结
- 环境光遮蔽在当代游戏项目中的使用越来越普遍,尽管其实现并不算复杂,但其覆盖的概念较多。从基础概念起进行理解推导,更容易掌握其实现过程。此外,
Unity中的SSAO实现在细节上有其特别的思路和算法,了解其实现有助于在SSAO的使用上找到合适的性能优化方案。