BVH(Bounding Volume Hierarchiy)是基于边界体积 (BV) 的结构,通过使用简单的几何形状,代替各种复杂的对象,从而加速检测效率。
简介
- BV(Bounding Volume),边界体积,即一个包含了一些物体的几何结构。由于场景的物体存在各种样式,做一些检测工作时,如相交性测试,需要对每种复杂的结构进行特殊处理,对复杂结构的计算成本也相对较高。然而很多时候经常没有出现相交,甚至和物体有较大的距离,此时仍然使用复杂的计算会导致整体效率低下。BVH 的基本思路是,使用简单的包围盒结构,代替原有的复杂结构,并对物体进行分组,从而简化计算过程,提升效率。
包围盒
- 常见的包围盒有:
- 球(sphere)
- 轴对齐包围盒(AABB,axis-aligned bounding box)
- 离散定向多面体(k-DOP,discrete oriented polytopes)
- 定向包围盒(OBB,oriented bounding box)
- …
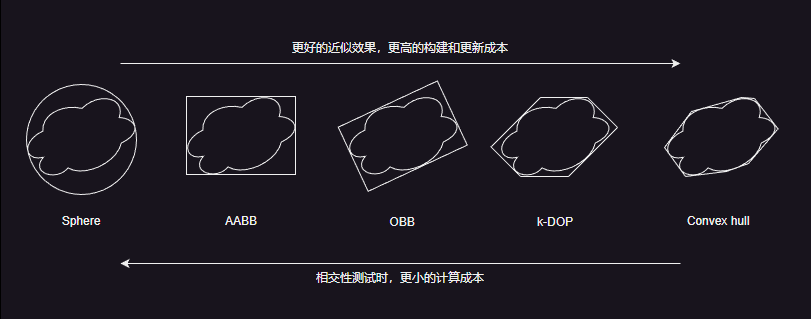
- 越是复杂的包围盒,能有更好的近似效果,当然代价就是更高的构建和更新成本。为了达到加速计算的效果,通常需要选择计算量较小的结构。由于 AABB 包围盒的轴与坐标轴相同,便于进行计算,因此通常会使用 AABB 包围盒来作为加速结构。
目标
- 使用 BVH ,是为了减少检测的过程中的检查次数,从而提高效率,因此需要最终构建出来的 BVH 达到以下目标:
- 平衡树。
- 所有包围盒都是紧凑的。
- 具有最小的冗余(即在树的每一层,对象分布在一个以上的包围盒中)。
层级构建
- 构建层级的方案有:
- 自底向上
- 自顶向下
- 插入式
自底向上
- 自底向上的构建流程为:
- 对每个对象创建其包围盒。
- 将一定数量的包围盒组合起来,创建一个新的包围盒。
- 递归对新的包围盒和原始包围盒进行分组,重复上一步。
- 当层级只有一个包围盒时,完成构建。
- 为了得到高质量的 BVH 结构,通常使用层次聚类算法(Agglomerative Clustering),主要步骤为:
- 分别计算每个包围盒与其他所有包围盒的距离。
- 比较所有的距离,找出其中最小距离的两个包围盒。
- 将最小距离的包围盒组成一个新的包围盒,重复上面的步骤。
- 上述实现方式为 O(N^3),该算法同样有 O(N^2) 的实现,但核心思路是一致的。
自顶向下
- 自顶向下的构建流程为:
- 对整体对象创建包围盒。
- 根据启发式方法,递归分离对象和创建包围盒。
- 当所有包围盒在当前层级只包含小于 n 个对象时,完成构建。
- 划分子节点,通常根据包围盒最长的边来划分,对于 AABB ,找到包围盒的距离最长一对平面,经过包围盒的中心且平行于这对平面进行划分。尽管这个方法看起来非常简单,但该方法已经被证明,它是高效的,并且能生产平衡树,仅仅一秒钟可以完成包含数千个多边形对象的完整层次设置,同时允许将对象动态添加到场景中。
插入式
- 插入式的构建流程为:
- 为新插入的叶子节点,找到最好的兄弟节点。
- 创建新的父节点。
- 沿着树往回重新调整包围盒。
表面积启发式(Surface Area Heuristic,SAH)
- 表面积启发式是一个有力的指标,用于构建 BVH ,核心思想是,光线击中物体的概率与物体的表面成比例,也就是说,当包围盒越紧凑,其表面积越小,光线相交的概率就越小,检测过程就越不容易出现假相交。因此 BVH 的构建过程中,当插入一个新的节点时,需要选择一个节点,使得增加的新的包围盒表面积是最小的,即整棵树的代价是最小的。
- 对于相同的叶节点,构成的 BVH 树的根节点也是一样的,但是内部节点可以有不同的组合。
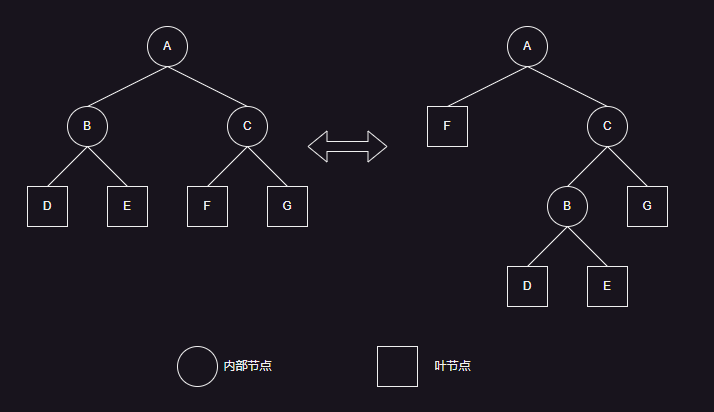
- 如上图所示,尽管根节点和叶节点相同,但是两棵树的代价是不一样的,也就是说,相同叶节点组成的树,其差别主要由内部节点决定,和叶节点的代价无关,因此树的代价 C(T) 可以定义为
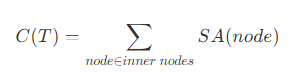 其中,SA(node) 代表内部节点 node 的代价,以 AABB 为例,即为 AABB 的表面积。
其中,SA(node) 代表内部节点 node 的代价,以 AABB 为例,即为 AABB 的表面积。
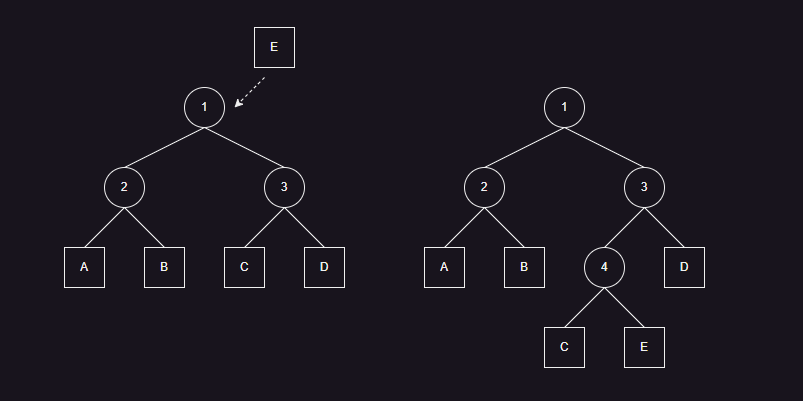
- 如上图所示,当插入一个节点 E 时,需要找到插入到各个位置中最小的代价。而插入节点后的新树,增加的代价为每一层的内部节点表面积的增量和。假设节点 E 插入到节点 4,则增加的代价为
 其中,△SA(node) 即内部节点表面积的增量,为原节点和新节点组成的新的包围盒,与原节点包围盒相比的表面积增量。
其中,△SA(node) 即内部节点表面积的增量,为原节点和新节点组成的新的包围盒,与原节点包围盒相比的表面积增量。

- 然而,对于具有 n 个叶节点的树,节点数量为 2n - 1 。如果要插入一个新节点,就要计算 2n - 1 个节点的增加代价,从中找出代价最小的节点进行插入。显然,计算所有节点的插入方式成本较高,因此引入一种更快的全局搜索方式,分支边界算法。
分支边界算法(Branch and Bound Algorithm)
- 插入到某个节点产生的代价,分为两部分:
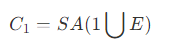
- 直接代价:对找到的兄弟节点创建父节点,产生新的内部节点的表面积,即 SA(4 ∪ E) 。
- 继承代价:由于调整各个祖先节点的包围盒而增加的表面积,即 △SA(3) + △SA(1) 。
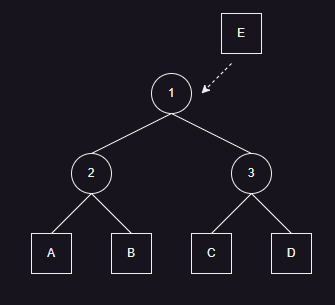
- 如上图所示,插入节点 E ,假如插入位置为节点 1 ,则产生的代价为
- 此时需要递归向下检查子节点 2 和节点 3 ,假如插入位置为节点 2 ,则
- 当节点 E 的包围盒在节点 2 的包围盒内时,新的内部节点的包围盒即为节点 2 的包围盒。
- 当节点 2 的包围盒在节点 E 的包围盒内时,新的内部节点的包围盒即为节点 E 的包围盒。
- 当节点 2 的包围盒与节点 E 的包围盒相交时,新的内部节点的包围盒即为节点 E 和节点 2组合的包围盒。
- 因此可以看出,节点 E 的表面积即为新内部节点的最小表面积,即插入的直接代价下限为 SA(E) ,因此子节点代价的下限值为
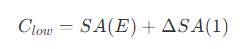
- 而对于子节点的子节点,直接代价的下限同样是 SA(E) ,而继承代价则会增加子节点包围盒修改增加的表面积,因此子节点代价的下限值即为下层节点的代价下限值。
- 如果子节点代价的下限值,小于当前最小代价,则记录当前最小代价,并将子节点加入检查队列,继续向下检查。
- 然而,如果当前最小代价,小于子节点代价的下限值,那么子节点则不需要再继续检查,从而可以减少多余的检查。
移动物体策略
- 对于移动物体,有几种处理方式
- 修改祖先包围盒。
- 重建子树。
- 代价很高,就像垃圾回收一样。
- 移除并重新插入。
- 代价同样很高,但是是分散的。
- 其中,修改祖先包围盒会导致树的质量边低。重建子树的代价很高,就像垃圾回收一样。移除并重新插入的代价同样很高,但是是分散的,因此通常选择这种方式。
- 由于物体并不经常每帧都移动较大的距离,因此可以采用扩大的 AABB ,只有当物体贴紧的 AABB 超出扩大的 AABB 时,才更新叶节点。生成扩大的 AABB 方式有很多种,可以根据实际情况自行选择。
树旋转
- 树旋转用于 AVL 树以保持它们的平衡,也可以用于 BVH 以减少表面积并减少排序输入引入的不平衡问题。
- 树旋转主要是与其父节点的兄弟节点交换,交换完成后,不会对上层和下层节点产生影响。
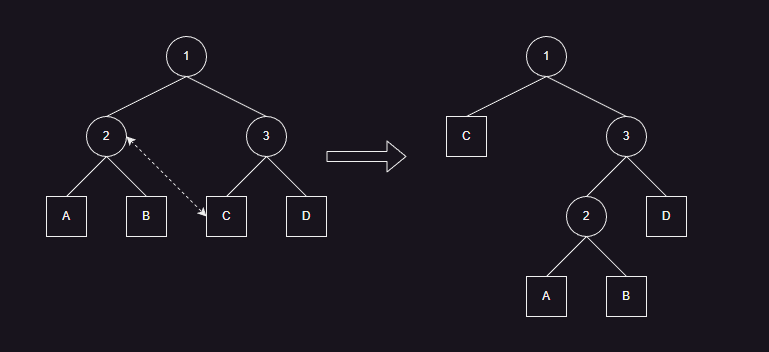
- 如图所示,节点 2 和节点 E 交换后,上层节点 1 以及下层节点 A 、B 、C 、D 都不会发生变化。旋转前,树的代价为
 旋转后,树的代价为
旋转后,树的代价为
 当旋转后的代价比原来小时,则可以改善树的结构。
当旋转后的代价比原来小时,则可以改善树的结构。
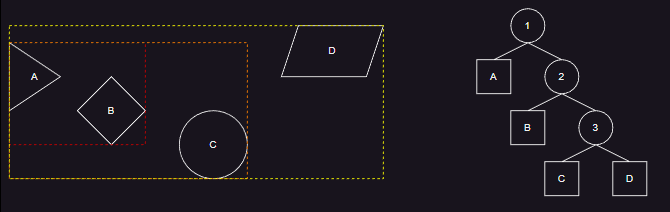
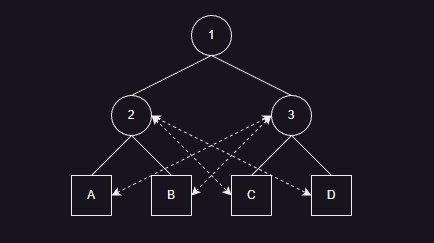
- 如上图对象 A 、B 、C 、D 是从左到右排序好的,当逐一插入时,就会出现链表的结构,失去了 BVH 加速的作用。
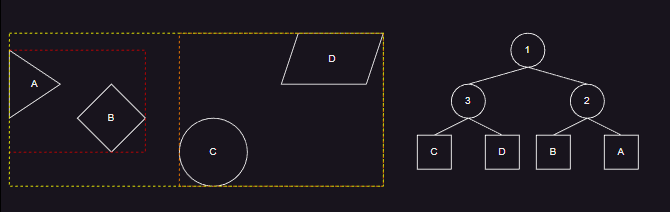
- 当插入节点 D 后,对插入位置 3 的父节点的兄弟节点,进行树旋转检查,发现代价减小,从而调整了树的结构,保持了 BVH 的树平衡性。
应用
- BVH 通过是用体积近似、几何特征简单的包围盒,来近似描述复杂的几何对象,并通过构造树状层次结构,逐层接近真实的几何对象,从而减少了中间大量的复杂计算,通常用于光线追踪、视锥裁减等,在三维场景的渲染中,是非常常用的结构。
光线追踪
- 对于场景中的对象,如果要求光线是否与物体相交,则需要对场景中的对象逐一遍历,当场景的对象比较复杂,并且数量较多时,显然效率低下。
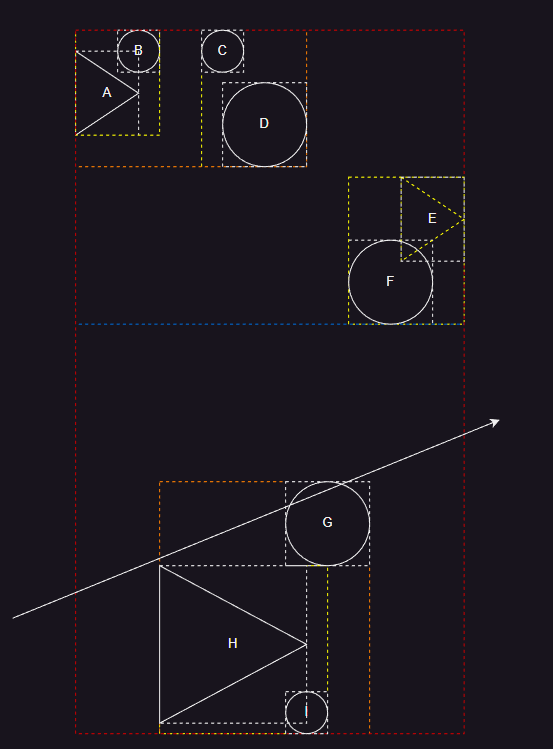
- 通过构建 BVH ,从每个物体开始,生成 AABB 包围盒,并逐层构建,最终组成一棵树。
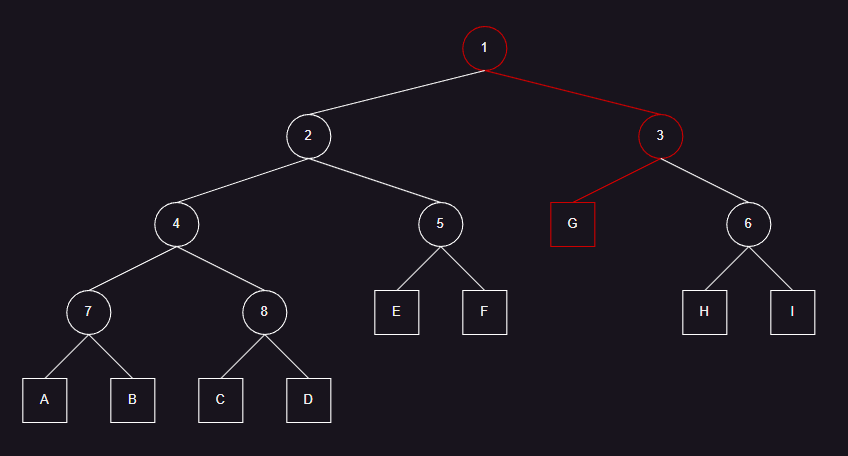
- 此时,求光线与物体是否相交,如上图所示,步骤为:
- 检查光线与包围盒 1 是否相交。
- 光线与包围盒 1 相交,检查包围盒 2 、包围盒 3 是否与光线相交。
- 光线与包围盒 2 不相交,与包围盒 3 相交,检查包围盒 G 、包围盒 6 是否与光线相交。
- 光线与包围盒 G 相交,与包围盒 6 相交,检查物体 G 是否与光线相交。
- 光线与物体 G 相交。
- 整个过程,进行了 4 次光线与 AABB 包围盒求交,和 1 次光线与几何物体求交。不采用 BVH 结构时,则需要进行 9 次光线与几何物体求交。因此 BVH 通常能得到较好的加速效果。
视锥裁剪
- 相比光线和物体求交,视锥裁剪需要检查哪些物体在视锥体范围内,即需要对几何体和几何体求交,复杂度会更高。同样,如果需要逐一检查,计算量会非常大。
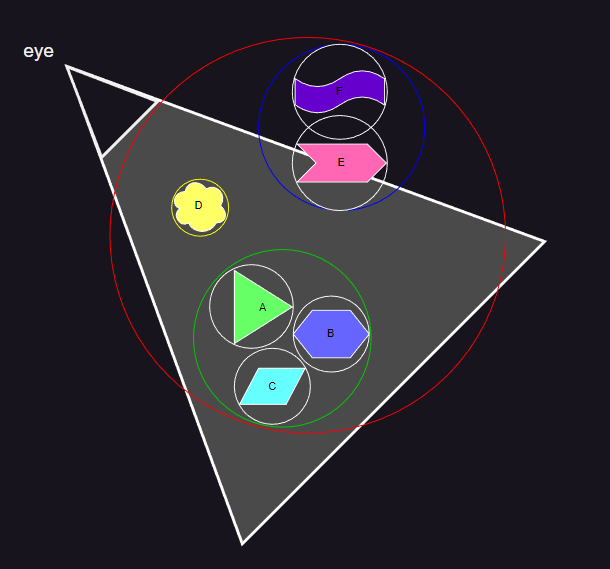
- 如上图所示,视锥体灰色部分为可见范围,构建包围盒后,检查步骤为:
- 检查视锥体和红色圆是否相交。
- 视锥体和红色圆相交,分别检查绿色圆、黄色圆、蓝色圆与视锥体是否相交。
- 绿色圆、黄色圆与视锥体相交,且在视锥体内部,则 A 、B 、C 、D 都在视锥体内部,蓝色圆与视锥体相交,检查 E 、F 是否与视锥体相交。
- E 与视锥体相交,F 在视锥体外。
- 可以看到,当包围盒在视锥体内部时,后续的子节点则不需要再进行计算。包围盒在视锥体外部时,也不再需要计算视锥体和真实物体的复杂几何求交。只有包围盒部分在视锥体内时,才需要对物体的真实范围进行求交计算。同样,可以看到 BVH 能得到很好的表现。
参考
- Real-Time Collision Detection for Dynamic Virtual Environments
- Dynamic Bounding Volume Hierarchies
- Efficient BVH Construction via Approximate Agglomerative Clustering
- Hierarchical Techniques in Collision Detection for Cloth Animation
- Fast, Effective BVH Updates for Dynamic Ray-Traced Scenes Using Tree Rotations
- wikipedia - Bounding volume hierarchy
- Real-Time Rendering 4th Edition